Aula 04
Atividades Práticas e plataformas para Robótica educacional
Caro (a) aluno(a), Neste módulo serão apresentadas algumas provas clássicas das olimpíadas de robótica: Segmento de referência, desvio de obstáculos e outras plataformas disponíveis para robótica educacional.
O seguidor de referência ou segmento de linha consiste em um veículo percorrer um caminho demarcado por uma linha.
O seguimento de referência é uma prova bastante comum em olimpíadas de robótica e pode ser observado no mundo real em indústrias e até mesmo em percursos inacessíveis ao homem.
A utilização de segmento de linha e desvio de obstáculos é uma ferramenta importantíssima para o aumento da produtividade através da redução do tempo no processo, para evitar colisões no ambiente de trabalho e otimizar a capacidade dos atuadores.
Assista ao vídeo “Segmento de Linha e desvio de obstáculos”.
http://www.youtube.com/v/ObPVUwXZmNE?hl=pt_BR&version=3&rel=0
Assista ao vídeo “Carros autônomos: da ficção para a realidade”.
http://www.youtube.com/v/Ukr95isO5aw?hl=pt_BR&version=3&rel=0
Após ser iniciado o software e carregada a tela inicial do programa, cria-se um novo projeto, indo em "Create new program", nomeando o projeto, clicando em "Go". Após isso, tem-se a área de trabalho do software, que conta com ferramentas baseadas em blocos de comando. Inicialmente, deve-se ter os softwares LEGO MINDSTORM NXT instalados no computador.
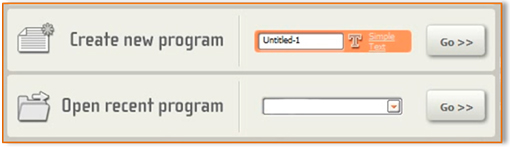
Figura 1 Local de criação e novo projeto. (Fonte: Autor)
Primeiramente, deve-se ir na opção "flow'' e inserir um bloco "LOOP"; esse primeiro bloco é um laço lógico de repetição. Na parte inferior, seleciona-se a opção "forever"; esta parte dita quantas vezes o programa repetirá as ações dentro do laço.
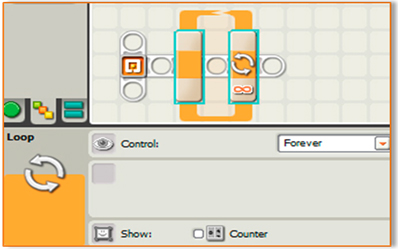
Figura 2 Configuração do primeiro bloco “LOOP”. (Fonte: Autor)
Novamente, na opção ''flow'', deve-se inserir um bloco "SWITCH" dentro do laço "LOOP". Na parte inferior, na área sensor, seleciona-se a opção "Color Sensor" e na área "porta" a porta 3. Na área “action”, a escolha deve ser a opção "COLOR Sensor". Na área "compare", escolhe-se "inside range" com o espectro escolhido pegando toda a cor preta.
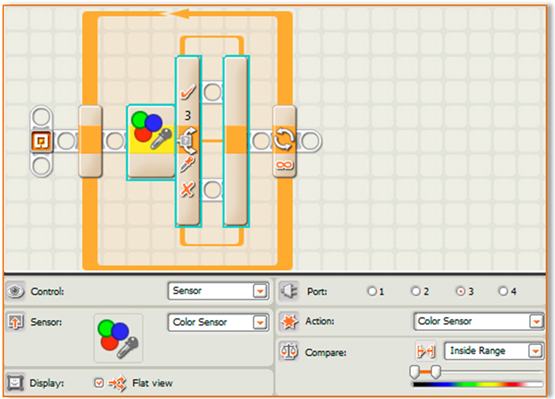
Figura 3 Configuração do primeiro bloco “Switch”. (Fonte: Autor)
Posteriormente, coloca-se um comando "MOVE" na parte superior do comando "SWITCH". Na área inferior, selecionam-se as portas “A” e “C”, direção para frente, potência 75 e duração infinita.
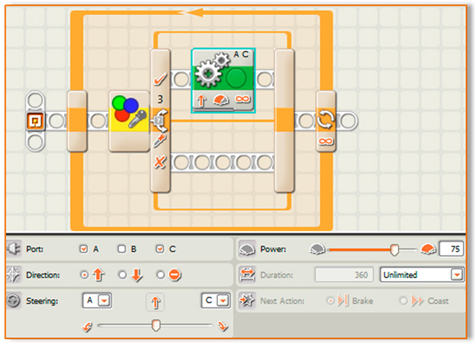
Figura 4 Inserção do primeiro bloco “Move”. (Fonte: Autor)
Na parte inferior do bloco "SWITCH", deve ser inserido um bloco MOVE. As portas selecionadas devem ser "AC". Os motores devem parar.
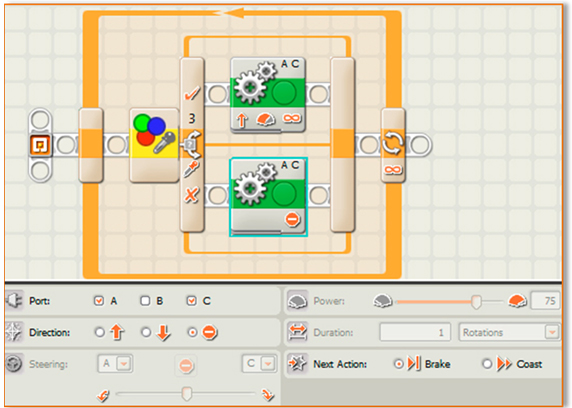
Figura 5 Configuração do primeiro bloco “LOOP”. (Fonte: Autor)
Ainda na parte inferior do comando switch, após o comando “move”, deve ser colocado um novo "LOOP”, selecionando a opção “forever”. Em seguida, um switch deve ser inserido dentro do loop; na área sensor, selecione a opção "Color Sensor". Na área "porta", selecione a porta 3. Na área action, selecione a opção "COLOR Sensor".
Na área compare, escolha a opção "inside range"; o espectro escolhido deve pegar toda a cor preta e azul.
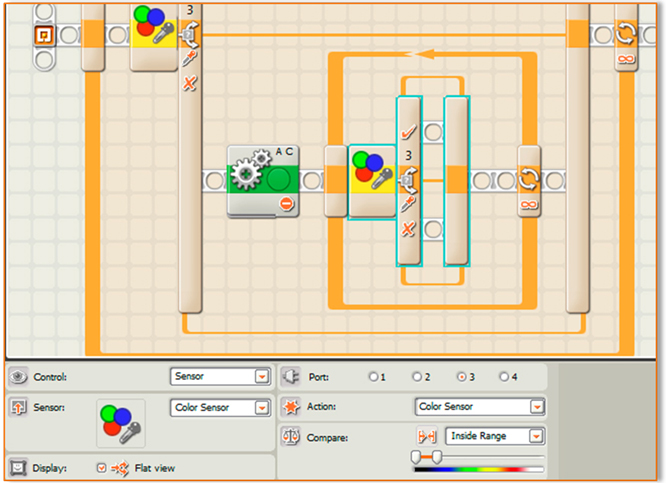
Figura 6 Configuração e inserção do segundo “Loop” e segundo “Switch”. (Fonte: Autor)
No switch mais interno, na parte superior, deve ser inserido um bloco MOVE. Vá a área inferior, selecione a porta C, direção para frente, potência 75 e duração infinita. Insira outro bloco MOVE, desta vez a porta deve ser a A e a direção deve ser "PARADO", a inserção do bloco deve ser feita ao lado do último bloco move inserido.
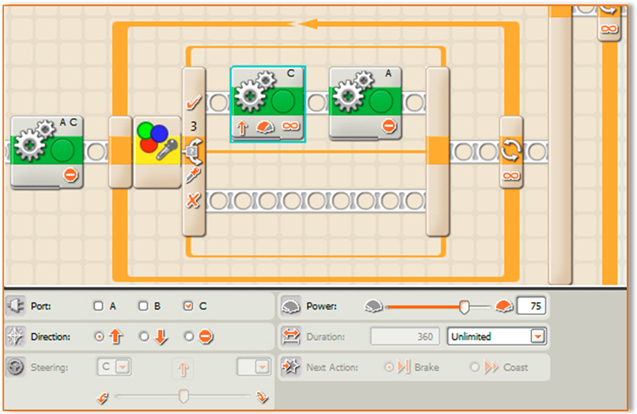
Figura 7 Motores da parte superior do segundo “Switch”. (Fonte: Autor)
Na parte inferior do switch mais interno, deve ser inserido um bloco MOVE. Vá a área inferior selecione a porta A, direção para frente, potência 75 e duração infinita. Insira outro bloco MOVE, desta vez a porta deve ser a C e a direção deve ser "PARADO".
A inserção do bloco deve ser feita ao lado do último bloco move inserido.
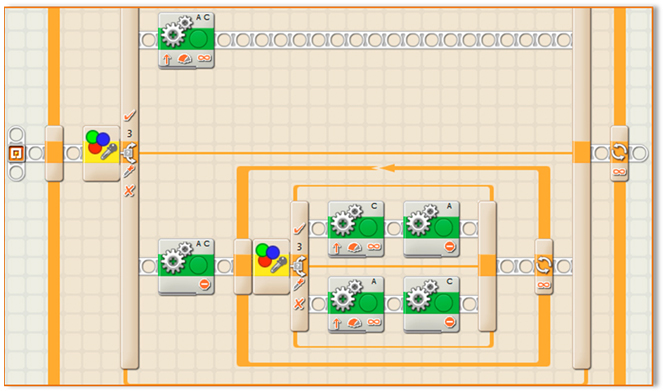
Figura 8 Algoritmo finalizado. (Fonte: Autor)
Agora, basta conectar o cabo USB ao NXT e transferir o programa a partir do comando DOWNLOAD.

Figura 9 Download do algoritmo para o NXT. (Fonte: Autor)
Com a conclusão do algoritmo para o NXT será possível reproduzir o que está no vídeo “Segmento de referência”.
http://www.youtube.com/v/YMl99Agw5ZU?version=3&hl=pt_BR&rel=0
Após ser iniciado o software clicando no ícone que se encontra na área de trabalho do seu computador e carregada a tela inicial do programa, cria-se um novo projeto. Você deve ir em “file” e selecionar “new Project” ou simplesmente clicar no símbolo “+” localizado na área superior logo abaixo da aba de ferramentas. Após isso, tem-se a área de trabalho do software que conta com ferramentas baseadas em bloco de comandos.
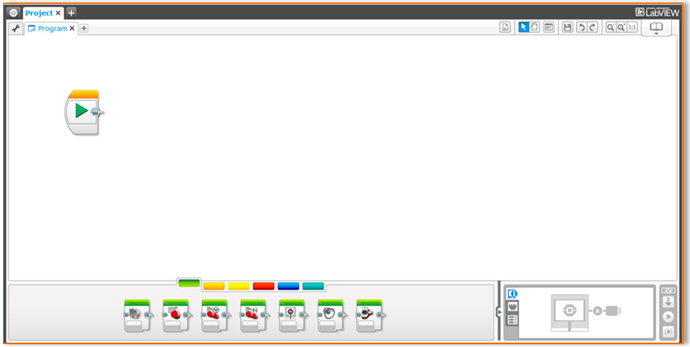
Figura 10 Local de criação e novo projeto. (Fonte: Autor)
Vamos iniciar o algoritmo. Utilizaremos a ideia de críticas e loop, apresentado na aula introdutória. O sensor a ser utilizado vai definir que ação deve ser realizada. Como a condição para o carro andar está relacionada a cor do percurso, a utilização do sensor de cor torna-se fundamental.
Inicialmente, vá a seção “FLOW CONTROL” ou simplesmente na cor laranja e insira o comando LOOP. Esse bloco deve ser conectado ao bloco START.
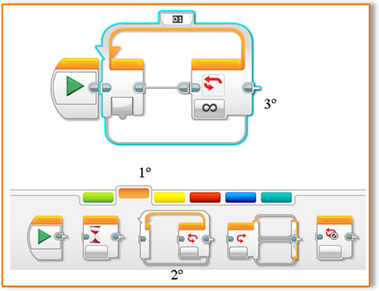
Figura 11 Passos para inserção de um Loop. (Fonte: Autor)
Seguindo os passos da Figura 11 inserimos um loop infinito no programa. A finalidade do mesmo é permitir que o sensor permaneça em constante teste e o veículo em movimento. O parâmetro do bloco loop será UNLIMITED.
Em seguida dentro do bloco LOOP, você deverá inserir um bloco SWITCH, este bloco pode ser encontrado na seção FLOW CONTROL.
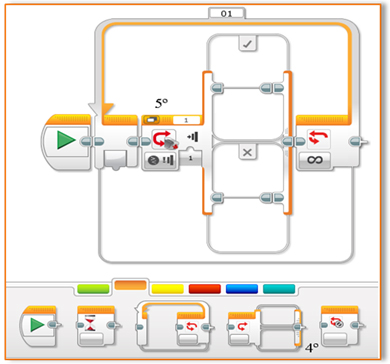
Figura 12 Inserção do comando Switch. (Fonte: Autor)
Agora você deverá inserir o parâmetro do bloco SWITCH que está inteiramente relacionado ao sensor de cor.
Selecione a opção COLOR SENSOR>COMPARE>COLOR.
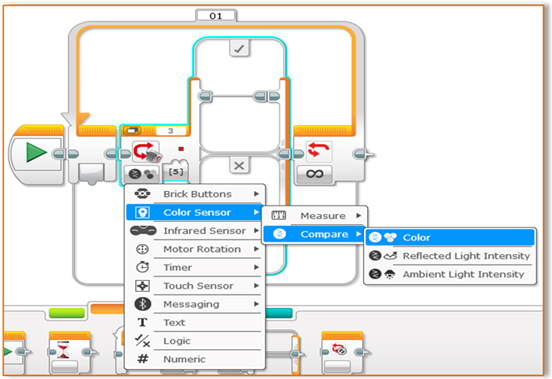
Figura 13 Mudança do tipo de sensor a ser utilizado. (Fonte: Autor)
Em seguida, selecione a cor preta, cor de número 1, lembrando que a porta do sensor de cor é a porta 3. Os passos podem ser observados a partir da figura 5.
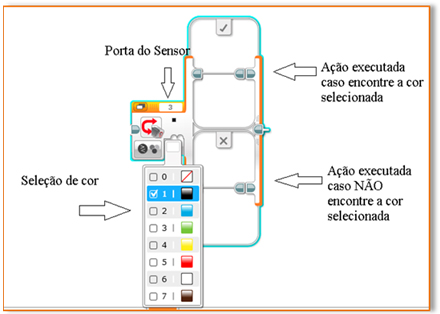
Figura 14 Parâmetros do sensor. (Fonte: Autor)
No primeiro campo, onde o sensor julga como a comparação sendo verdadeira, vamos inserir um bloco motor. Vá à parte onde estão situados os comandos, na área inferior do software, e escolha a opção “ACTION” ou simplesmente clique na aba verde. Você encontrará os blocos motores. Selecione o bloco de comando que conta com dois motores e é denominado por “MOVE STEERING”. Observe a figura 15.
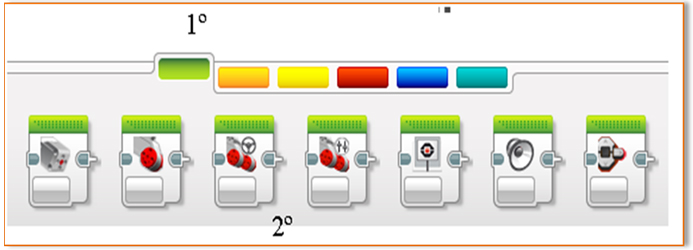
Figura 15 Inserção do primeiro bloco de acionamento de motor. (Fonte: Autor)
Na área “PORTS” você deve selecionar as portas “B+C”, agora vá à área DIRECTION e selecione a opção “ON”, direção para frente e potência 75.
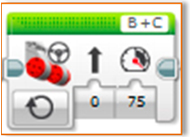
Figura 16 Configuração do primeiro Bloco Motor (Fonte: Autor)
Ou seja, enquanto o sensor enxergar a cor preta andará de forma ilimitada.
Na área inferior, a qual o bloco SWITCH julga falsa deve ser inserido o mesmo bloco motor. No entanto, na área DIRECTION será selecionada a opção “OFF”. Ou seja, se o sensor não distinguir a cor preta ele deve parar.

Figura 17 Configuração do segundo Bloco Motor (Fonte: Autor)
Pronto, a parte de seguimento de retas está concluída.
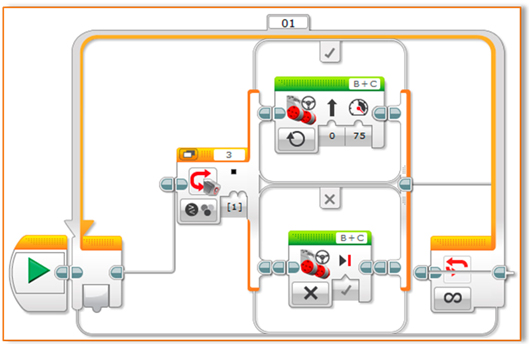
Figura 18 Primeira parte feita loop, switch e os dois motores. (Fonte: Autor)
Devemos pensar agora nas curvas e no comportamento dos motores. Se meu carro deseja fazer uma curva para direita o motor direito deve parar e o esquerdo girar. Já na curva para esquerda, o motor esquerdo para e o direito gira. Pensando assim, poderemos continuar nosso algoritmo.
Lembrando que a porta do sensor de cor é a porta 03.
Ainda na parte inferior do comando SWITCH, após o bloco MOVE STEERING, insira outro bloco SWITCH. Você o encontrará na seção FLOW CONTROL (aba laranja). Agora você deverá inserir o parâmetro do bloco SWITCH que está inteiramente relacionado ao sensor de cor. Selecione a opção COLOR SENSOR>COMPARE>COLOR. Em seguida, selecione a cor preta, cor de número 1.
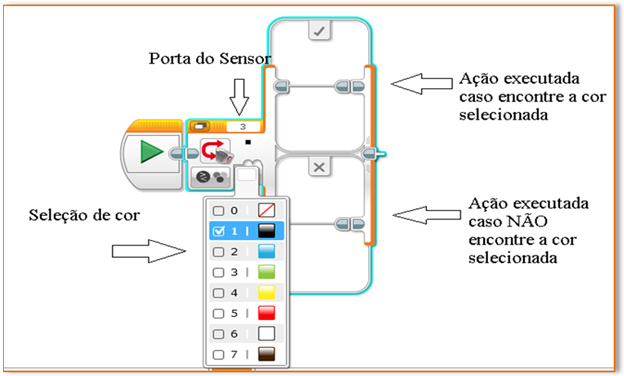
Figura 19 Parâmetros do segundo SWITCH. (Fonte: Autor)
Você irá agora determinar os parâmetros do segundo SWITCH. No primeiro campo onde o sensor julga como a comparação sendo verdadeira, vamos inserir dois blocos motores. Vá à parte onde estão situados os comandos motores, na área inferior do software, e escolha a opção “ACTION” ou simplesmente clique na aba verde. Você encontrará os blocos motores. Selecione o bloco de comando que conta com dois motores e é denominado por “MOVE STEERING”. No primeiro bloco, na área “PORTS”, você deve selecionar apenas a porta B; agora vá à área DIRECTION e selecione a opção “ON”, e potência 75. No segundo bloco, na área “PORTS”, você deve selecionar apenas a porta C; agora vá à área DIRECTION e selecione a opção “OFF”. Dessa forma, o carrinho fará curvas ou para a direita ou para a esquerda, dependendo de como estão conectadas as portas.
Na área inferior, a qual o bloco SWITCH julga falsa, você irá inserir dois blocos motores. Vá à parte onde estão situados os comandos motores, na área inferior do software, e escolha a opção “ACTION” ou simplesmente clique na aba verde. Você encontrará os blocos motores. Selecione o bloco de comando que conta com dois motores e é denominado por “MOVE STEERING”. No primeiro bloco, na área “PORTS”, você deve selecionar apenas a porta B; agora vá à área DIRECTION e selecione a opção “OFF”. No segundo bloco, na área “PORTS”, você deve selecionar apenas a porta C, agora vá à área DIRECTION e selecione a opção “ON”, com potencia de 75. Dessa forma, o carrinho fará curvas ou para a direita ou para a esquerda, dependendo de como estão conectadas as portas.
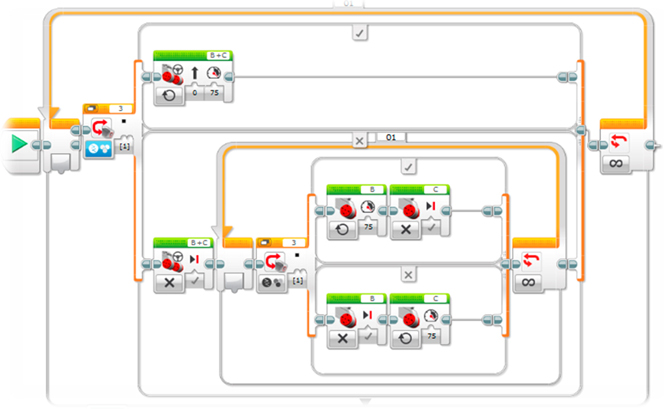
Figura 21 Programa Completo (Fonte: Autor)
Ou seja, seja qual for o percurso delimitado pela cor preta o carrinho estará apto a seguir. Contendo curvas, retas ou até mesmo cruzamentos.

Figura 22 Gravação do programa no EV3 . (Fonte: Autor)
Agora basta salvar o programa com o nome que desejar, conectar o bloco programável ao computador a partir do cabo USB, verificar se o EV3 está corretamente ligado e clicar no botão “DOWNLOAD”
Com a conclusão do algoritmo para o EV3 será possível reproduzir o que está no vídeo “Segmento de referência”.
http://www.youtube.com/v/HFmlujOdhTM?version=3&hl=pt_BR&rel=0
O sensor ultrassônico é utilizado para medir a distância de obstáculos, sendo imprescindível o seu uso em um robô cujo objetivo é não chocar-se com objetos ou detectar a presença de algum corpo.

Figura 23 Robô com utilização de sensor ultrassônico.
Após isso, tem-se a área de trabalho do software, que conta com ferramentas baseadas em blocos de comando.
Após ser iniciado o software e carregada a tela inicial do programa, cria-se um novo projeto, indo em "Crate new program", nomeando o projeto, clicando em "Go".
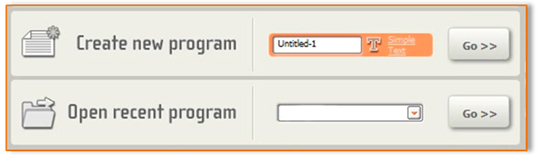
Figura 24 Local de criação e novo projeto. (Fonte: Autor)
Primeiramente, deve-se ir na opção "flow'' e clicar no bloco "LOOP", esse primeiro bloco é um laço lógico de repetição. Na parte inferior selecione a opção "forever", esta parte dita quantas vezes o programa repetirá as ações dentro do laço.
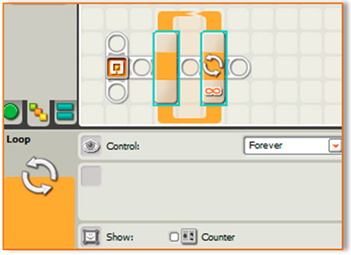
Figura 25 Configuração do primeiro bloco “LOOP”. (Fonte: Autor)
Novamente na opção ''flow'', deve-se inserir um bloco "SWITCH” posicionado dentro do laço "LOOP". Na parte inferior, na área sensor, deve ser selecionada a opção "Ultrasonic Sensor". Em "show" opta-se pela opção “centímetros” e na área “compare” é escolhida a opção “Maior que” 15.

Figura 26 Configuração do bloco “SWITCH”. (Fonte: Autor)
Na seção COMMOM, deve-se escolher o comando "MOVE" e inseri-lo na parte superior do comando "SWITCH". Na área inferior, devem ser selecionadas as portas “A” e “C”, com direção para frente, potência 75 e duração infinita. Essa associação do bloco MOVE e SWITCH permite ao robô seguir seu movimento para frente enquanto não encontrar um obstáculo a uma distância menor que 15 centímetros do seu sensor.
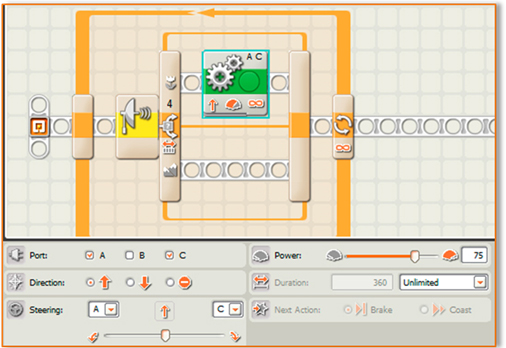
Figura 27 Inserção do bloco “MOVE”. (Fonte: Autor)
Na parte inferior do bloco "SWITCH", deve-se inserir outro bloco MOVE. As portas selecionadas devem ser "A” e “C" e os motores devem parar. Ainda na parte inferior do comando switch, após o primeiro comando MOVE, deve-se colocar um novo bloco MOVE; agora apenas a porta “A” deve ser selecionada com movimento para frente. Na área de duração do movimento, seleciona-se 1,5 rotações. Neste ramo, os motores devem parar ao encontrar o obstáculo, e, efetuando o movimento de rotação de apenar um motor, o robô deve girar sobre seu eixo, ficando assim livre de objetos a sua frente.
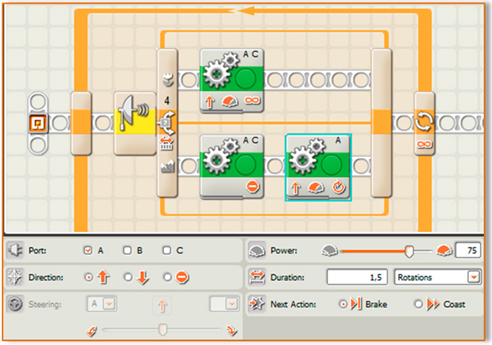
Figura 28 Inserção de blocos na parte inferior do bloco “SWITCH”. (Fonte: Autor)
Em seguida, outro bloco MOVE com portas AC e direção para frente, mas agora com 2 rotações, deve ser inserido. Um novo bloco MOVE deve ser inserido, selecionando agora apenas a porta do motor C com duração de 1,5 rotações. Outro comando MOVE deve ser inserido, e, na área inferior, selecionadas as portas A e C, direção para frente, potência 75 e duração infinita.
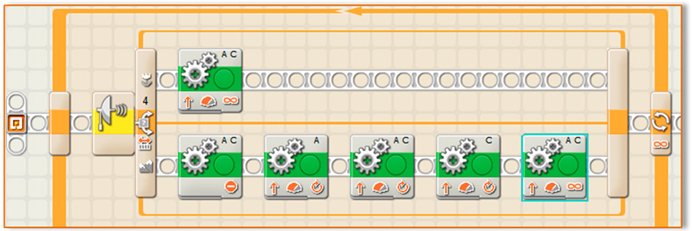
Figura 29 Novos blocos “Move”. (Fonte: Autor)
Esses blocos fazem com que o carrinho ande para frente o suficiente para ultrapassar o obstáculo e possa girar para o lado oposto de seu giro inicial, ficando assim com sua frente novamente livre de obstáculos, mas dessa vez com seu movimento na mesma direção inicial.
Posteriormente, na opção FLOW deve-se selecionar o comando WAIT e inseri-lo após o último MOVE da parte inferior do comando switch. Escolhe-se a opção “SENSOR ULTRASONIC”, em SHOW a escolha deve ser centímetros e na seção COMPARE a escolha deve ser menor que 15.

Figura 30 Configuração do bloco LOOP. (Fonte: Autor)
Agora deve ser inserido um bloco MOVE com as portas selecionadas “AC” e “Parados”. Outro bloco MOVE deve ser inserido, apenas a porta C deve ser selecionada com o valor de 1,5 rotações e potência 75. Outro bloco MOVE com portas AC, mas agora com 2 rotações e potência 75 deve ser inserido. Por fim, repete-se o último passo, no entanto, a porta selecionada deve ser apenas a porta A com o valor de 1,5 rotações e direção para frente e potência 75.
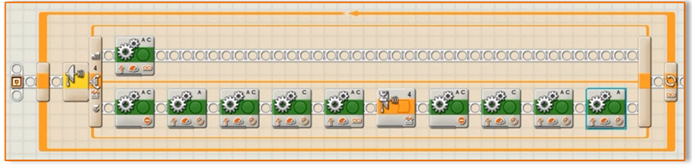
Figura 31 Algoritmo finalizado. (Fonte: Autor)
Agora, basta conectar o cabo USB ao NXT e transferir o programa a partir do comando DOWNLOAD.
Neste último trecho, o carrinho irá esperar até encontrar um obstáculo, quando irá parar e fazer o mesmo movimento de desvio para o primeiro obstáculo. Entretanto, desta vez ele efetuará o desvio pelo outro lado, para que subsecivos desvios para um mesmo lado não o deixem distante do seu destino.

Figura 32 Download do algoritmo para o NXT. (Fonte: Autor)
Assista ao vídeo “Desvio de obstáculos com o Lego NXT”.
http://www.youtube.com/watch?v=Roc7QdeJVYM
Após ser iniciado o software clicando no ícone que se encontra na área de trabalho do seu computador e carregada a tela inicial do programa, cria-se um novo projeto. Você deve ir em “file” e selecionar “new Project” ou simplesmente clicar no símbolo “+” localizado na área superior logo abaixo da aba de ferramentas. Após isso, tem-se a área de trabalho do software que conta com ferramentas baseadas em bloco de comandos.
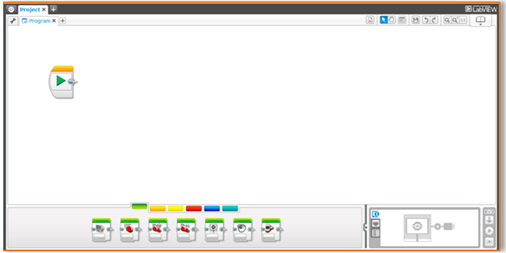
Figura 33 Local de criação e novo projeto. (Fonte: Autor)
Vamos iniciar o algoritmo. Utilizaremos a ideia de críticas e loop, apresentado na aula introdutória. O sensor a ser utilizado vai definir que ação deve ser realizada. Como a condição para o carro andar está relacionada a distância dos obstáculos à sua frente, a utilização do sensor de infravermelho torna-se fundamental.
Inicialmente, vá à seção FLOW CONTROL ou simplesmente na cor laranja e insira o comando LOOP. Esse bloco deve ser conectado ao bloco START.
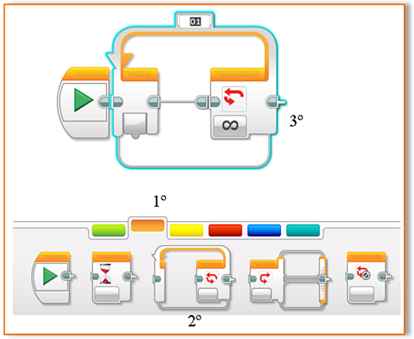
Figura 34 Passos para inserção de um Loop. (Fonte: Autor)
Seguindo os passos da Figura 12, inserimos um loop infinito no programa. A finalidade do mesmo é permitir que o sensor permaneça em constante teste e o veículo em movimento. O parâmetro do bloco loop será UNLIMITED.
Em seguida, dentro do bloco LOOP, você deverá inserir um bloco SWITCH; este bloco pode ser encontrado na seção FLOW CONTROL.
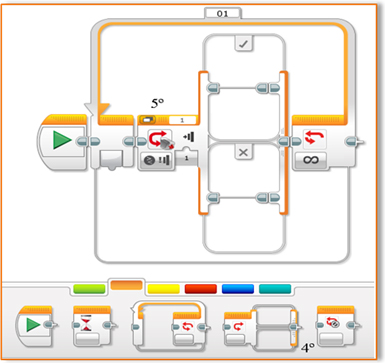
Figura 35 Inserção do comando Switch. (Fonte: Autor)
Agora você deverá inserir o parâmetro do bloco SWITCH que está inteiramente relacionado ao sensor de infravermelho. Selecione a opção INFRARED SENSOR>COMPARE>PROXIMITY.
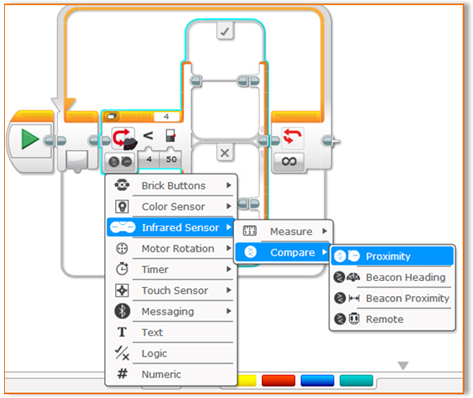
Figura 36 Mudança do tipo de sensor a ser utilizado. (Fonte: Autor)
Devemos, então, configurar os parâmetros do sensor. Ao mudar o item “distance” para o símbolo “>”, ele indica se a comparação será com a distância maior que a programada. No segundo campo, define-se a distância que o sensor deve analisar que, para o caso, escolhe-se uma distância de 25 centímetros. Deve-se ter cuidado em observar a porta em que está ligado o sensor.
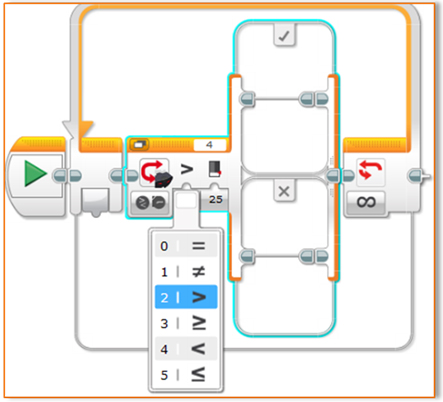
Figura 37 Parâmetros do sensor. (Fonte: Autor)
Quando o veículo se aproximar de algum obstáculo a menos de vinte e cinco centímetros, o código executado será o de baixo, enquanto isto não acontecer será executado o código da parte de cima.
No primeiro campo, onde o sensor julga como a comparação sendo verdadeira, vamos inserir um bloco motor. Vá à parte em que estão situados os comandos, na área inferior do software, e escolha a opção “ACTION” ou simplesmente clique na aba verde. Você encontrará os blocos motores. Selecione o bloco de comando que conta com dois motores e é denominado “MOVE STEERING”. Observe a figura 38.
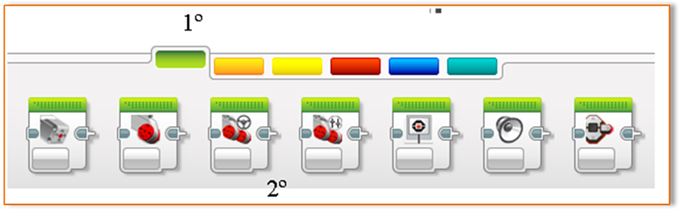
Figura 38 Inserção do primeiro bloco de acionamento de motor. (Fonte: Autor)
Na área “PORTS” você deve selecionar as portas “B+C”, agora vá à área DIRECTION e selecione a opção “ON”, direção para frente e potência 75.
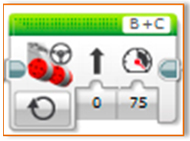
Figura 39 Configuração do primeiro Bloco Motor (Fonte: Autor)
Ou seja, enquanto o sensor não encontrar um obstáculo a menos de 25 centímetros de distância andará de forma ilimitada.
Na área inferior, a qual o bloco SWITCH julga falsa, deve ser inserido o mesmo bloco motor. No entanto, na área DIRECTION será selecionada a opção “OFF”. Ou seja, se o sensor infravermelho encontrar um obstáculo a menos de 25 centímetros de distância, ele deve parar.

Figura 40 Configuração do segundo Bloco Motor (Fonte: Autor)
Pronto, a parte que impede que o carro colida com um obstáculo está concluída.
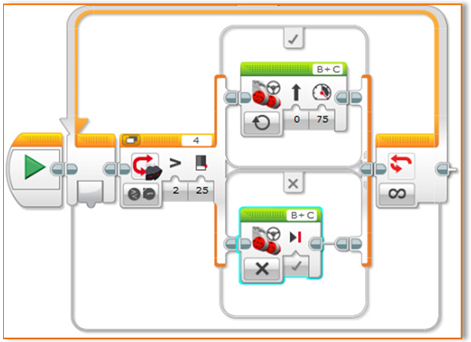
Figura 41 Primeira parte feita, com loop, switch e os dois motores. (Fonte: Autor)
Devemos agora pensar em como o robô contornará os obstáculos e seguira seu movimento. Se meu carro deseja fazer uma curva para a direita, o motor direito deve parar e o esquerdo girar. Já em um giro para a esquerda, o motor esquerdo para e o direito gira. Pensando assim, poderemos continuar nosso algoritmo.
Ainda na parte inferior do comando SWITCH, após o bloco MOVE STEERING, insira um bloco LARGE MOTOR. Você o encontrará na seção “ACTION” ou simplesmente clicando na aba verde. Agora você deverá inserir o parâmetro do bloco LARGE MOTOR.
Na área “PORTS” você deve selecionar a porta “B”. Na área DIRECTION, selecione a opção “ON FOR ROTATIONS” com duração de 1.5 rotações, direção para frente e potência 75.
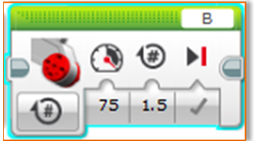
Figura 42 Parâmetros do segundo bloco motor da parte inferior do SWITCH. (Fonte: Autor)
Insira outro bloco motor, desta vez um bloco “MOVE STEERING”, que pode ser encontrado na seção “ACTION” ou simplesmente clicando na aba verde. Neste bloco, devem ser selecionadas as portas “B + C”; na área DIRECTION selecione a opção “ON FOR ROTATIONS” com duração de 2 rotações, direção para frente e potência 75.
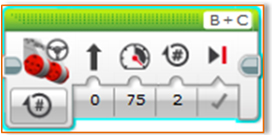
Figura 43 Parâmetros do bloco MOVE STEERING. (Fonte: Autor)
Outro bloco “LARGE MOTOR” deve ser inserido. Este bloco pode ser encontrado na seção “ACTION” ou simplesmente clicando na aba verde. Na área “PORTS”, você deve selecionar a porta “C”. Na área DIRECTION, selecione a opção “ON FOR ROTATIONS” com duração de 1.5 rotações, direção para frente e potência 75.
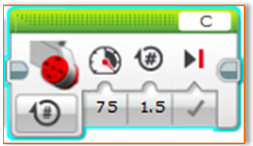
Figura 44 Parâmetros do bloco LARGE MOTOR. (Fonte: Autor)
Outro bloco “MOVE STEERING” deve ser inserido. Este bloco pode ser encontrado na seção “ACTION” ou simplesmente clicando na aba verde. Na área “PORTS”, você deve selecionar as portas “B + C”. Na área DIRECTION, selecione a opção “ON” com direção para frente e potência 75.
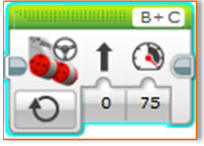
Figura 45 Parâmetros do bloco MOVE STEERING. (Fonte: Autor)
Os blocos inseridos na parte inferior do SWITCH impedem que o carrinho colida com o obstáculo, gire para o lado esquerdo e ande para frente o suficiente para ultrapassar o obstáculo. Após isso, ele gira para o lado oposto de seu giro inicial, ficando assim com sua frente novamente livre, mas, dessa vez, com seu movimento na mesma direção inicial.
O código, após estes passos, pode ser visto na figura a seguir:
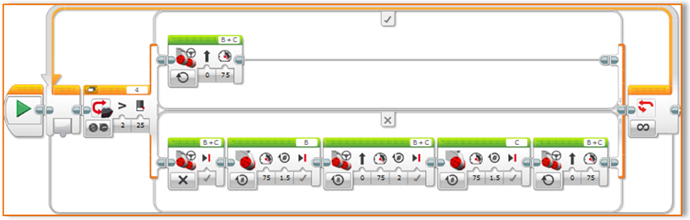
Figura 46 – Código parcial. (Fonte: Autor)
Os blocos inseridos na parte inferior do SWITCH impedem que o carrinho colida com o obstáculo, gire para o lado esquerdo e ande para frente o suficiente para ultrapassar o obstáculo. Após isso, ele gira para o lado oposto de seu giro inicial, ficando assim com sua frente novamente livre, mas, dessa vez, com seu movimento na mesma direção inicial.
Consecutivos desvios farão com que o veículo perca sua direção inicial, visto que ele sempre faz os desvios para um lado. Assim, adicionar um desvio, subsequente ao primeiro, para o lado oposto, o colocaria na sua direção inicial. Portanto, vamos repetir os blocos inseridos anteriormente, trocando as portas nos blocos “LARGE MOTOR”.
Vamos inserir um bloco WAIT. Esse bloco separa os comandos de antes com os comandos que seguem. Ele pode ser encontrado na seção “FLOW CONTROL”
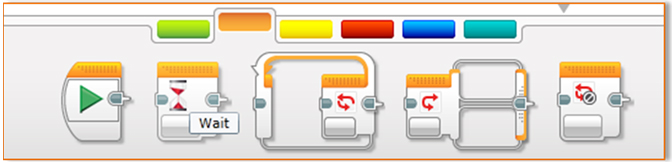
Figura 47 – Bloco WAIT. (Fonte: Autor)
O bloco WAIT deve ser inserido após o último bloco motor. E configurado para trabalhar com o sensor de infravermelho, comparando se o obstáculo está a uma distância maior, e com o valor de 25 centímetros.
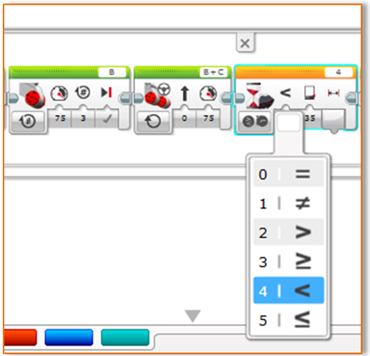
Figura 48– Parâmetros do loco WAIT. (Fonte: Autor)
Após o bloco WAIT, devemos inserir um comando para os motores pararem. Na seção “ACTION”, ou simplesmente na aba verde, deve-se inserir um bloco “MOVE STEERING”. As portas selecionadas devem ser “B + C”; na área DIRECTION, será selecionada a opção “OFF”. Ou seja, se o sensor infravermelho encontrar um obstáculo a menos de 25 centímetros de distância, ele deve parar.

Figura 49 – Configuração bloco que para os motores. (Fonte: Autor)
Será adicionado mais um bloco motor. Desta vez, será um bloco “LARGE MOTOR”. Na área “PORTS”, você deve selecionar a porta “C”. Na área DIRECTION, selecione a opção “ON FOR ROTATIONS” com duração de 1.5 rotações, direção para frente e potência 75.
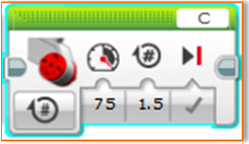
Figura 50 – Parâmetros do bloco LARGE MOTOR. (Fonte: Autor)
Insira outro bloco motor, desta vez, um bloco “MOVE STEERING” que pode ser encontrado na seção “ACTION” ou simplesmente clicando na aba verde. Neste bloco devem ser selecionadas as portas “B + C”; na área DIRECTION, selecione a opção “ON FOR ROTATIONS” com duração de 2 rotações, direção para frente e potência 75.
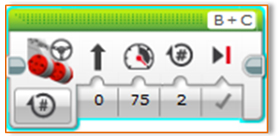
Figura 51 – Parâmetros do bloco MOVE STEERING. (Fonte: Autor)
Por fim, outro bloco “LARGE MOTOR” deve ser inserido. Este bloco pode ser encontrado na seção “ACTION” ou simplesmente clicando na aba verde. Na área “PORTS”, você deve selecionar a porta “B”. Na área DIRECTION, selecione a opção “ON FOR ROTATIONS” com duração de 1.5 rotações, direção para frente e potência 75.
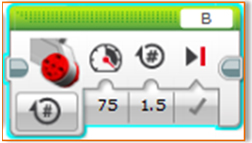
Figura 52 – Parâmetros do bloco LARGE MOTOR. (Fonte: Autor)
O código então encontra-se finalizado, e sua última parte pode ser visto na figura a seguir:
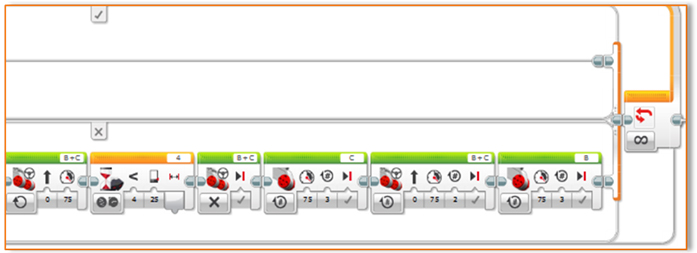
Figura 53 – Parte final do código. (Fonte: Autor)
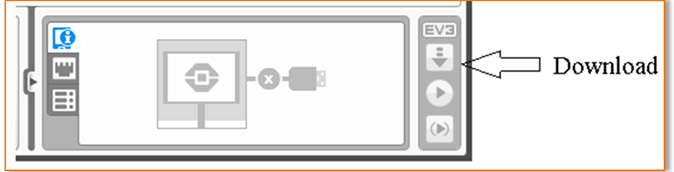
Figura 54 – Gravação do programa no NXT. (Fonte: Autor)
Agora basta salvar o programa com o nome que desejar, conectar o bloco programável ao computador a partir do cabo USB, verificar se o EV3 está corretamente ligado e clicar no botão “DOWNLOAD”.
Assista ao vídeo desvio de obstáculos com o Lego EV3.
http://www.youtube.com/v/1IrhK4vfsPI?version=3&hl=pt_BR&rel=0
Consulte Guia do Usuário do Lego EV3 disponível em:
O microrrobô BOT120 PICAXE 20X2 é um simples kit de montar que utiliza uma forma única que não requer nenhum tipo de soldagem de fios para construir, sendo, assim, um microrrobô bastante fácil de construir.
O microrrobô é uma placa mãe que tem um microcontrolador, PICAXE 20X2, que pode ser programado utilizando um software chamado Logicator. Os programas são feitos utilizando fluxogramas ou na linguagem PICAXE BASIC.
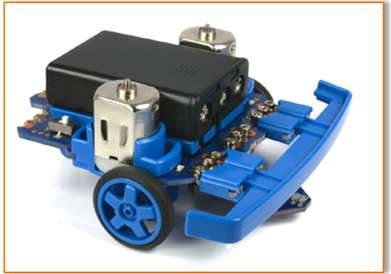
Figura 55– Microrrobô PICAXE 20X2. (Fonte: Autor)
A programação no PICAXE 20X2 pode ser realizada em Windows, Linux e Mac. Os programas feitos são transmitidos para o microrrobô através do cabo USB AXE027.
A placa mãe do microrrobô é equipada com uma caixa de baterias, dois motores para ter o movimento, uma sirene piezelétrica, dois ledes, um interruptor e uma tomada de download para a conexão do cabo USB AXE027.
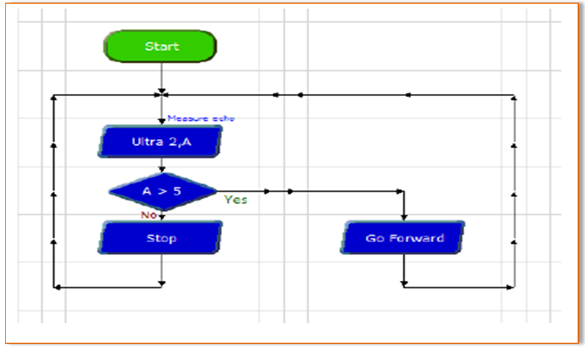
Figura 56 – Exemplo do programa. (Fonte: Autor)
O microrrobô é entregue como um painel pré-montado que contém os módulos eletrônicos, bem como um conjunto de partes mecânicas que são de automontagem.
Um aspecto único do microrrobô é que toda a montagem das peças principais pode ser concluída sem a necessidade de um ferro de solda ou outras ferramentas. A sua montagem é feito com uma chave Allen, que é fornecida com o kit.
Depois de montado o microrrobô, temos de fazer a instalação do programa (Logicator) e conectar o microrrobô através do cabo USB AXE027 para podermos programar no mesmo.
O Logicator é um software que nos permite programar em fluxogramas ou usando a linguagem de programação básica que denominamos de Basic. O Logicator consegue programar das duas formas.
O software pode ser baixado na página do PICAXE ( www.picaxe.co.uk ) gratuitamente.
Depois do Logicator instalado, é só conectar o microrrobô PICAXE 20X2 no seu computador por meio do cabo USB AXE027 e começar a programação.
BATE E VOLTA
A primeira atividade é bastante simples para podermos iniciar e assim entender como funciona o nosso software e o microrrobô.
O programa consiste em seguir em frente até encontrar um objeto. Quando o microrrobô encontra o objeto, ele para e começa a andar para traz. O microrrobô consegue identificar o objeto pelos bumper que estão inseridos na parte frontal da placa mãe que estão localizados no pino C.1 e no pino C.3.
Com isso, segue o programa.
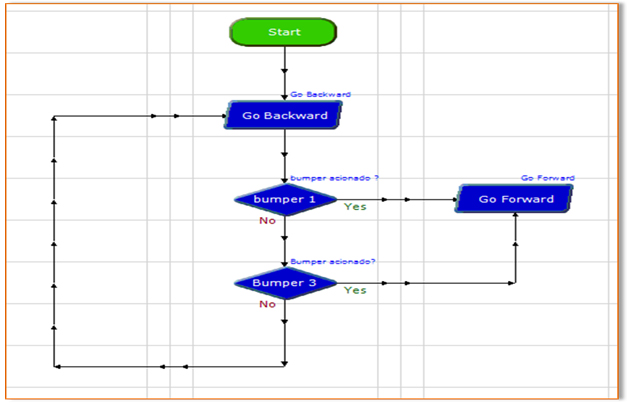
Figura 57 – Programa bate e volta. (Fonte: Autor)
SEGUIMENTO DE REFERÊNCIA
O programa demonstra o uso do microrrobô seguindo uma linha preta. Essa linha preta deve ser criada em cima de uma cor pálida para que seja possível o microrrobô identificar e reconhecer para poder seguir a referência.
Seu microrrobô deve ter o sensor de linha rastreador instalado no centro da placa mãe, localizado no meio no pino C.2 / ADC 8 e o para-choques e os seus dois sensores de colisão devem ser instalados à esquerda e à direita da placa mãe na parte frontal no pino C.1 e no pino C.3.
Quando colocado em uma linha preta, seu microrrobô vai avançar na diagonal no segmento da linha preta, quando ele deixa a linha preta ele se movimentará em um sentindo circular procurando assim a referência novamente, ou seja, a linha preta. Se o microrrobô colidir com qualquer coisa, um dos dois bumper será ativado. Quando os bumper do microrrobô forem ativados, ele vai parar até que o obstáculo seja removido, e logo após, volta a seguir a linha de referência.
Segue agora o programa.
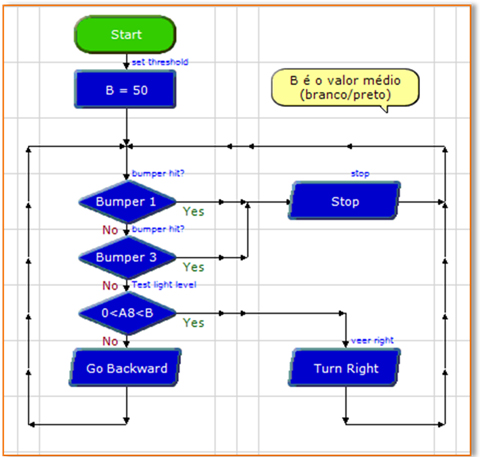
Figura 58 – Programa de seguimento de referência. (Fonte: Autor)
Escolha uma das plataformas apresentadas sobre robótica e elabora um texto sobre as principais funcionalidades.
Guia do Usuário do Lego EV3 disponível em: http://www.lego.com/en-us/mindstorms/downloads/software/ddsoftwaredownload/
MINDSTORMS education, Manual do NXT 2.0. Disponível em: http://www.inf.furb.br/~aureliof/downloads/ManualNXT.pdf Disponível em: < http://education.lego.com/downloads/?q={DC0CE993-6544-45A1-8680-B2A547D1EEB6} >Acesso em 01 Jan. 2014.